Scientific Objective
The aim of TMC is to map topography in both near and far side of the Moon and prepare a 3-dimensional atlas with high spatial and altitude resolution. Such high resolution mapping of complete lunar surface will help us to understand the evolution process and allow detailed study of regions of scientific interests. The digital elevation model available from TMC along with the Lunar Laser Ranging Instrument (LLRI) on Chandrayaan-1 will also improve the Moon gravity model
Payload Configuration Details
The TMC will image in the panchromatic spectral region of 0.5 to 0.85 �m with a spatial/ ground resolution of 5m, 10 bit quantization and swath coverage of 20 Km. The camera is configured for imaging in the push broom mode with three linear 4K element detectors in the image plane for fore, nadir and aft views in the along track direction of satellite movement. The fore and aft view angle is �25� respectively with respect to Nadir corresponding to B/H ratio of 1. TMC will measure the solar radiation reflected / scattered from Moon�s surface. The dynamic range of the reflected signal is quite large (>300), represented by the two extreme targets - fresh rock surface and mature mare soil. The other factors affecting the illumination are the seasonal variation, latitude-longitude of the scene and anisotropic reflectance of lunar surface. Radiometric range of 1024 is planned to cover the total dynamic range. Additionally in polar region where illumination is poor at all times, SNR improvement will be achieved, by setting the integration time �n� time the dwell time. The camera will have four gain settings to cover the varying illumination condition over Moon.
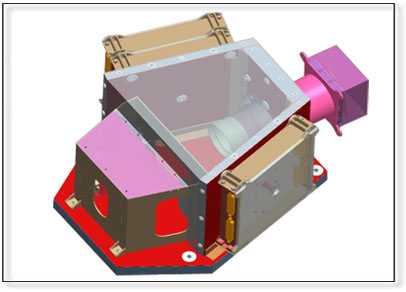
TMC uses Linear Active Pixel Sensor (APS) detector with in-built digitizer. Single refractive optics will cover the total field of view for the three detectors. The output of the detector will be in digitized form. The optics is designed as a single unit catering to the wide field of view (FOV) requirement in the along track direction. The incident beam from the fore (+25�) and aft (-25�) directions are directed on to the focusing optics using mirrors. Modular camera electronics for each detector is custom designed for the system requirements using FPGA / ASIC. The expected data rate is of the order of 50Mbps. The dimension of TMC payload is 370 X 220 X 414 mm3 and would weigh about 7kg.