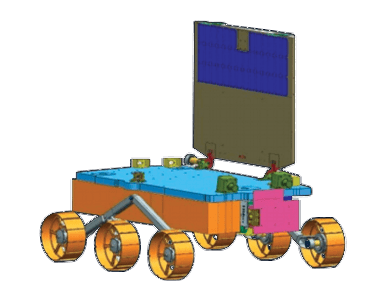
The mission's rover was called Pragyan with a mass of 27 kg (60 lb), and would have operated on solar power.[4][5] The rover was to move on six wheels, traversing 500 m (1,600 ft) on the lunar surface at the rate of 1 cm (0.39 in) per second, perform on-site analyses and send the data to the lander, which would have relayed it to the Mission Control on the Earth.
For navigation, the rover would have used:
- Stereoscopic camera-based 3D vision: two 1 megapixel, monochromatic navcams in front of the rover to provide the ground control team a 3D view of the surrounding terrain, and help in path-planning by generating a digital elevation model of the terrain. IIT Kanpur contributed to the development of the subsystems for light-based map generation and motion planning for the rover.
- Control and motor dynamics: the rover has a rocker-bogie suspension system and six wheels, each driven by independent brushless DC electric motors. Steering is accomplished by differential speed of the wheels or skid steering.
The expected operating time of Pragyan rover was one lunar day, or ~14 Earth days, as its electronics were not designed to endure the frigid lunar night. However, its power system has a solar-powered sleep/wake-up cycle implemented, which could have resulted in longer service time than planned. Two aft wheels of the rover had the ISRO logo and the State Emblem of India embossed on them to leave behind patterned tracks on the lunar surface.
- Dimensions: 0.9 × 0.75 × 0.85 m [8]
- Power: 50 watts
- Travel speed: 1 cm/sec
- Mission duration: ~14 Earth days (one lunar day)
Source: https://en.wikipedia.org/wiki/Chandrayaan-2#Pragyan_rover_2